




* 본 이미지는 참고용입니다.제품의 정확한 사양은 데이터시트를 참고 바랍니다.
- 공유하기
-




개발보드/프로그래머
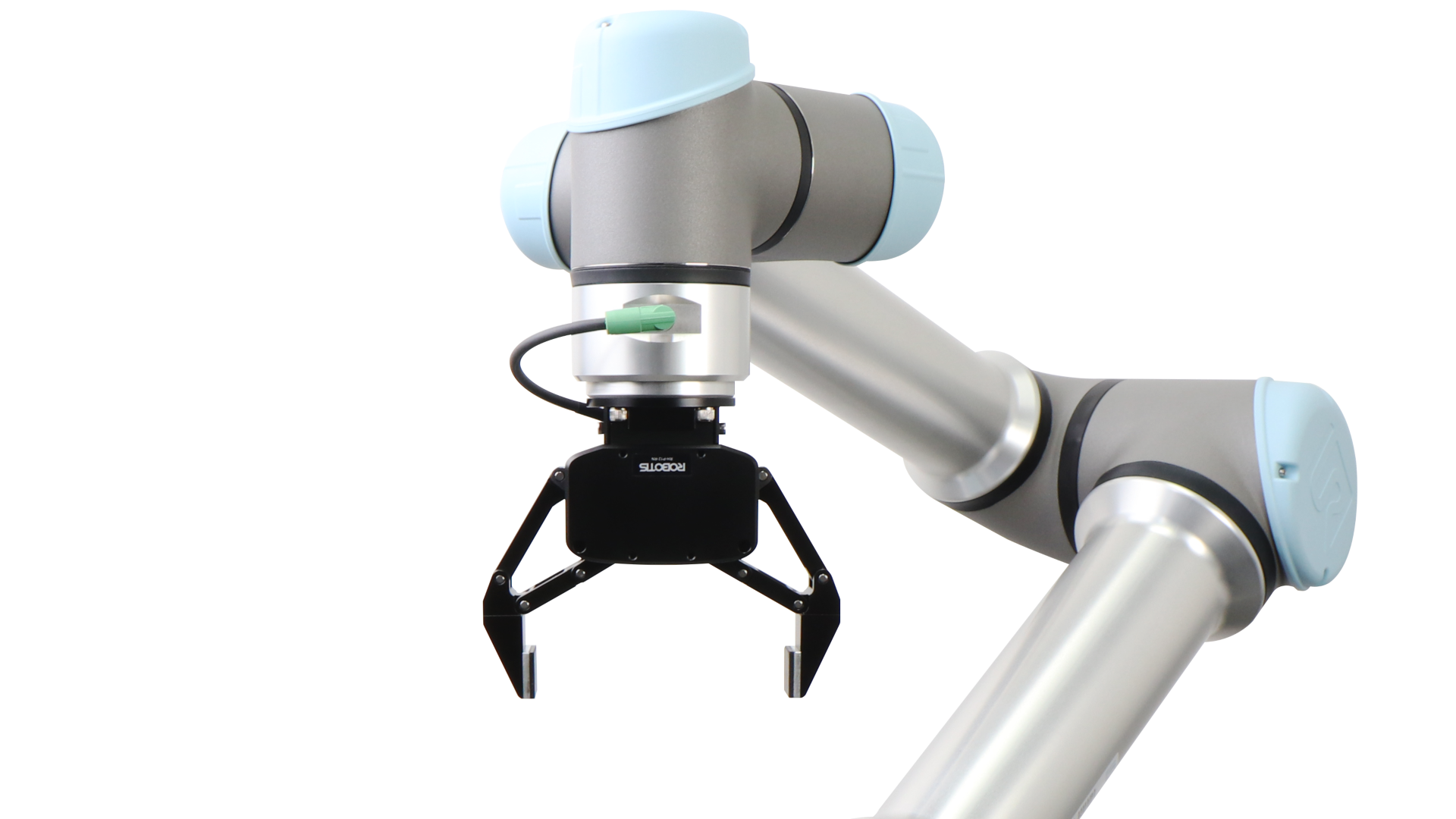
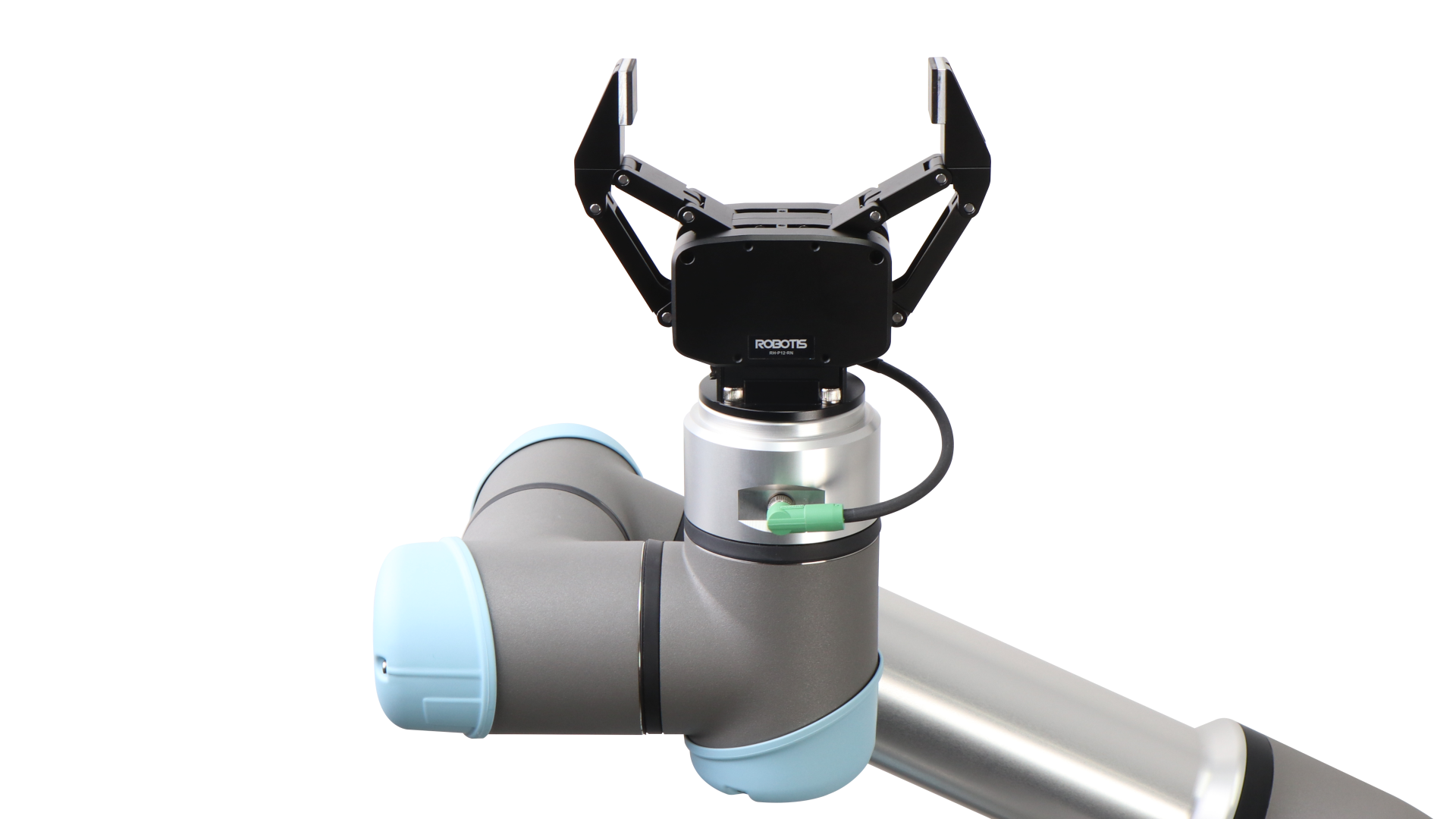
RH-P12-RN-UR 유니버설로봇 e-Series용 로봇핸드
4,242,600원
(VAT 별도)-
제품번호
EN00004764
-
브랜드명
로보티즈 : 로봇팔
-
제조사
로보티즈
-
M.O.Q
1
-
평균발송일
약 3일
- 포장단위
-
판매단위
1
-
배송비
3,000 (60,000원 이상 무료배송)
수량
총 주문 금액
4,242,600원
(VAT 포함) 4,666,860원
상품상세정보


특징
글로벌 협동로봇인 유니버설로봇 e-Series 전용 로봇핸드입니다.
1자유도, 2핑거 구조의 기본형 핸드
10W급 DC모터 1개를 탑재하고 2개의 손가락을 장착한 다기능 로봇핸드
적응형 파지 구조
Passive Joint를 적용한 Adaptive Hand로 다양한 형태의 물체를 집을 수 있음
전류 제어 (힘 제어)
토크 제어와 전류 기반 위치 제어 기능을 이용하여 다양한 재질의 물체를 안전하게 집을 수 있음
초경량, 고출력
500g의 가벼운 무게에 5kg의 높은 가반하중을 가짐
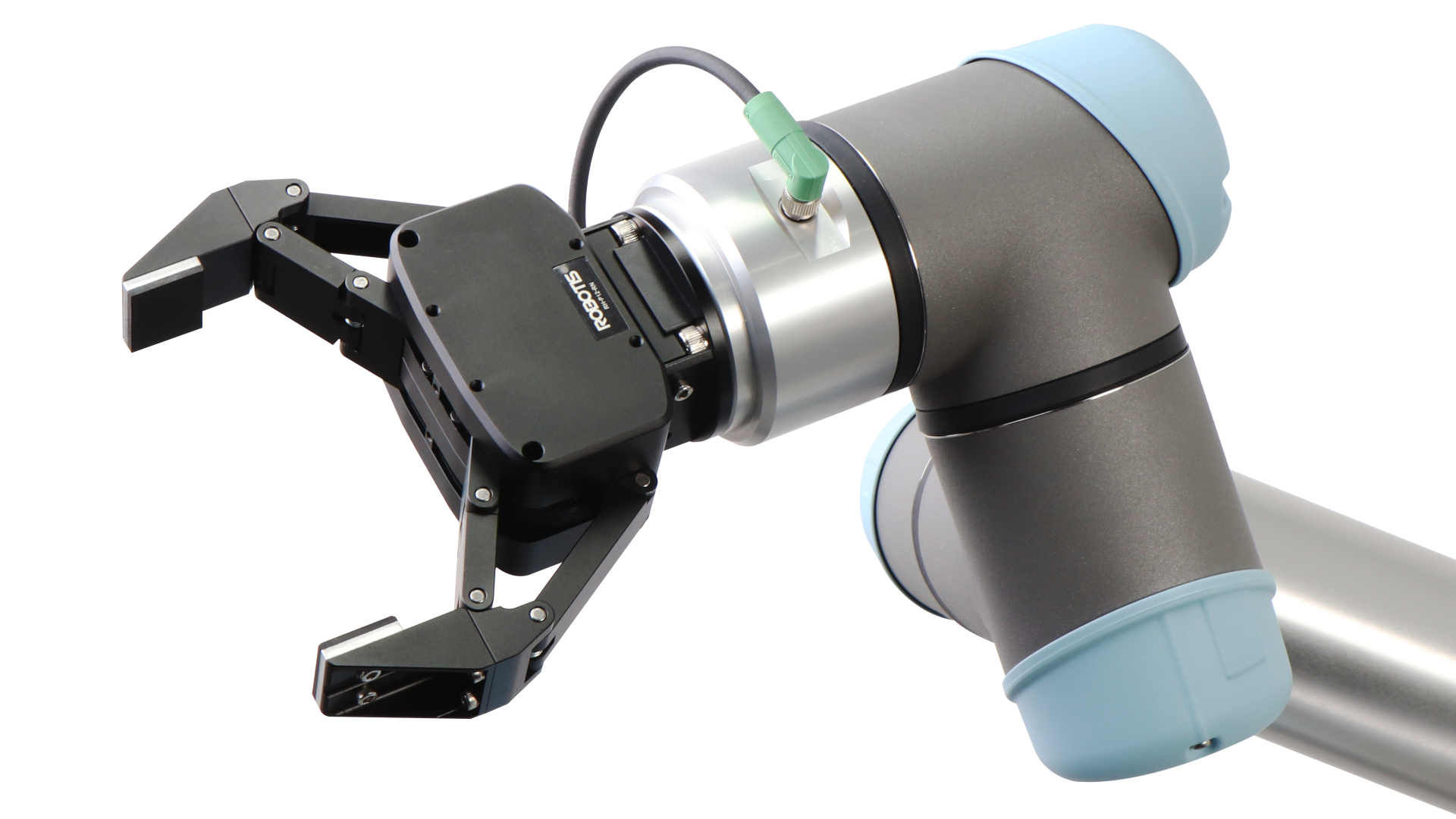
탈착형 핑거팁 적용
분리 가능한 핑거팁을 적용하여 사용자가 제작한 핑거팁을 결합할 수 있음
간편하고 쉬운 마운팅
전용 케이블과 마운팅 어댑터를 포함하고 있어 유니버설로봇 e-Series에 손쉽게 결합 가능

기본 구성품
기본모델인 RH-P12-RN에 유니버설로봇 e-Series 전용 부품이 포함된 패키지입니다.
| RH-P12-RN | 1 (조립완성품) |
|---|---|
| UR 마운팅 프레임 | 1 |
| 케이블 커버 프레임 | 1 |
| 로봇케이블 180mm (URe 전용) | 1 |
| 렌치볼트 WB M3x4 | 4 |
| 렌치볼트 WB M6x8 | 6 |
| 렌치볼트 WB M3x8 | 6 |
| 육각렌치 | 2종 |
| USB 메모리 (UR Cap 설치용) | 1 |
| 퀵스타트 설명서 | 1 |

사용 가능 제품
UR3e
UR5e
UR10e
UR16e
H/W 사양
| MCU | ST CORTEX-M4 (STM32F405 @ 168Mhz, 32bit) |
|---|---|
| Position Sensor | Contactless Absolute Encoder (12bit, 360°) |
| Motor | Coreless |
| Baud Rate | 9,600 bps ~ 10.5Mbps |
| Control Algorythm | PID Control |
| Degree of Precision | 0.088° |
| Operating Mode | Current Control Mode Current based Position Control Mode |
| Weight | 500g |
| Stroke | 0-106mm |
| Gear Ratio | 1181 : 1 |
| Maximum Gripping Force | 170N |
| Recommended Payload | 5kg |
| Operating Temperature | -5°C ~ 55°C |
| Nominal Voltage | 24V |
| Command Signal | Digital Packet |
| Protocol Type | RS485 Asynchronous Serial Communication (8bit, 1stop, No Parity) |
| Physical Connection | RS485 Multidrop BUS |
| ID | 0 ~ 252 |
| Feedback | Position, Velocity, Current, Temperature, Input Voltage, etc |
| Material | Full Metal Gear, Metal Body |
| Standby Current | 30mA |
출고시 기본 설정
| ID | 1 |
|---|---|
| 통신속도 | 57600bps |
구매 후 사용 환경에 따라 ID와 통신속도 등을 설정 변경하여 사용하시기 바랍니다.
주의사항
핑거팁의 내구성 강화를 위해 형태가 변경되었으며, 이로 인해 스트로크가 109mm에서 106mm로 변경되었습니다.
(2019년 11월 4일 이후 출고버전부터 적용)
관련자료링크
등록된 사용후기
사용후기가 없습니다.
등록된 상품문의
상품문의가 없습니다.